概览
Volo
Volo 是字节跳动服务框架团队研发的轻量级、高性能、可扩展性强、易用性好的 Rust RPC 框架,使用了 Rust 最新的 AFIT 和 RPITIT 特性。
Volo 使用 Motore 作为中间件抽象层,Motore 基于 AFIT 和 RPITIT 设计。
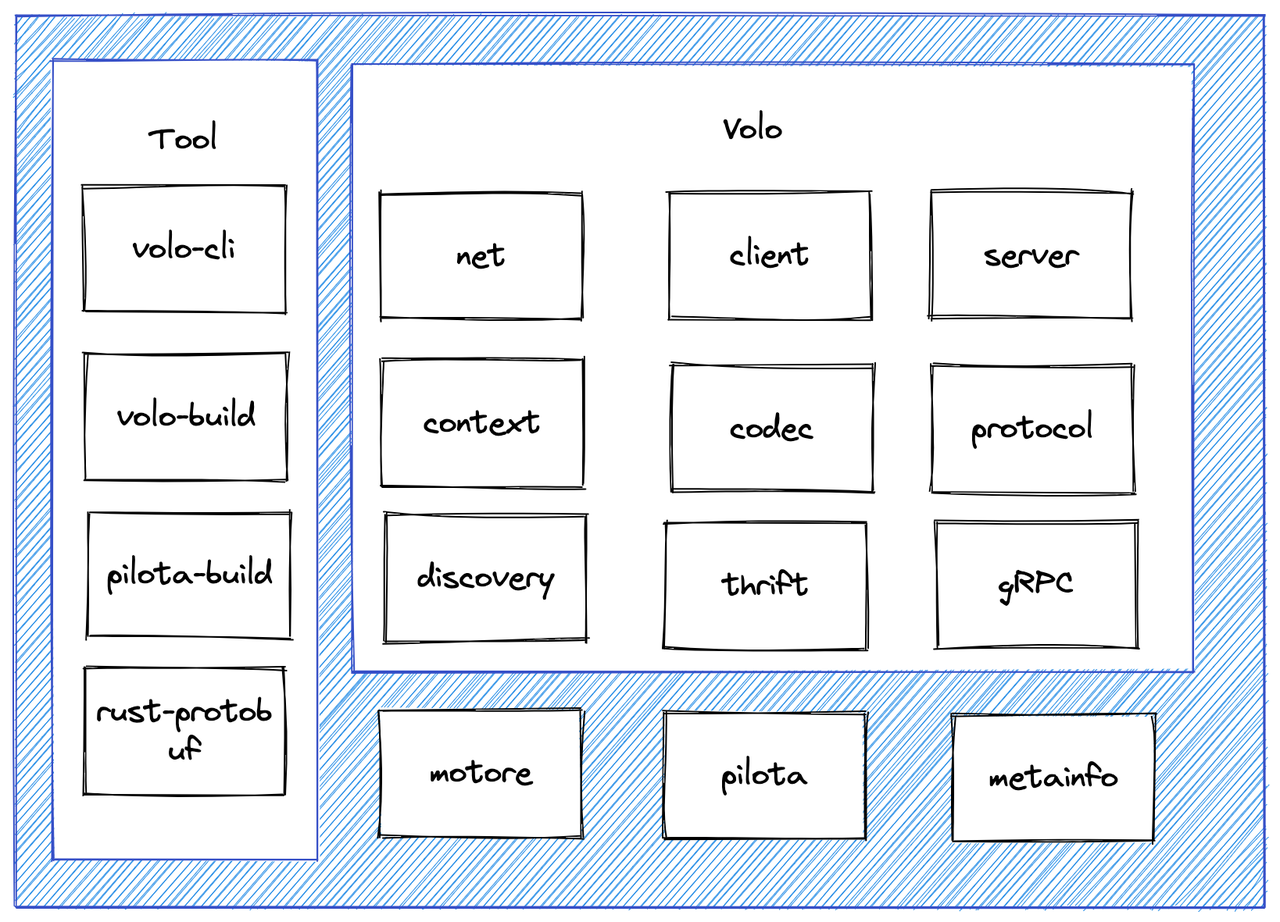
架构图
特性
基于 AFIT 和 RPITIT 设计
我们热爱并追随最新的技术,Volo 的核心抽象使用了 Rust 最新的 AFIT 和 RPITIT 特性,在这个过程中我们也借鉴了 Tower 的设计。 Tower 是一个非常优秀的抽象层设计,适用于目前的 stable rust 的情况下,非常感谢 Tower 团队。
通过 AFIT 和 RPITIT,我们可以避免很多不必要的 Box 内存分配,以及提升易用性,给用户提供更友好的编程接口和更符合人体工程学的编程范式。
高性能
Rust 以高性能和安全著称,我们在设计和实现过程中也时刻以高性能作为我们的目标,尽可能降低每一处的开销,提升每一处实现的性能。
首先要说明,和 Go 的框架对比性能是极不公平的,因此我们不会着重比较 Volo 和 Kitex 的性能,并且我们给出的数据仅能作为参考,希望大家能够客观看待; 同时,由于在开源社区并没有找到另一款成熟的 Rust 语言的 Async 版本 Thrift RPC 框架,而且性能对比总是容易引战,因此我们希望尽可能弱化性能数据的对比,仅会公布我们自己极限 QPS 的数据。
在和 Kitex 相同的测试条件(限制 4C)下,Volo 极限 QPS 为 35W;同时,我们内部正在验证基于 Monoio(CloudWeGo 开源的 Rust Async Runtime)的版本,极限 QPS 可以达到 44W。
从我们线上业务的火焰图来看,得益于 Rust 的静态分发和优秀的编译优化,框架部分的开销基本可以忽略不计(不包含 syscall 开销)。
易用性好
Rust 以难学难用而闻名,我们希望尽可能降低用户使用 Volo 框架以及使用 Rust 语言编写微服务的难度,提供最符合人体工程学和直觉的编码体验。因此,我们把易用性作为我们重要的目标之一。
比如,我们提供了 volo 命令行工具,用于初始化项目以及管理 idl;同时,我们将 thrift 及 gRPC 拆分为两个独立(但共用一些组件)的框架,以提供最符合不同协议语义的编程范式及接口。
我们还提供了#[service]宏(可以理解为不需要 Box 的 async_trait)来使得用户可以无心理负担地使用异步来编写 Service 中间件。
扩展性强
收益于 Rust 强大的表达和抽象能力,通过灵活的中间件 Service 抽象,开发者可以以非常统一的形式,对 RPC 元信息、请求和响应做处理。
比如,服务发现、负载均衡等服务治理功能,都可以以 Service 形式进行实现,而不需要独立实现 Trait。
相关的扩展,我们会放在 volo-rs 组织下,也欢迎大家贡献自己的扩展到 volo-rs~
相关生态
- Volo-rs:Volo 的相关生态
- Pilota:Volo 使用的 Thrift 与 Protobuf 编译器及编解码的纯 Rust 实现(不依赖 protoc)
- Motore:Volo 参考 Tower 设计的,使用了 AFIT 和 RPITIT 的 middleware 抽象层
- Metainfo:Volo 用于进行元信息透传的组件,期望定义一套元信息透传的标准